

 es
es en
en ru
ru ar
ar






Inversores V&T en la industria de máquinas giratorias
I. Técnicas Introducción
La máquina de hilar es la máquina de hilar principal. El rendimiento y la calidad del hilo hilado reflejan ampliamente las ventajas y desventajas de cada procedimiento de trabajo en el proceso de hilado.
La unidad de producción de la hilandería es el huso. El rendimiento (kg) por mil horas de huso se usa frecuentemente para medir el nivel de producción de la hilandería.
La escala de producción de la hilandería está representada por el total de husos de la hilandería. El hilo de hilar en cada huso se rompería por todo tipo de razones. La tasa de rotura de puntas se representa con frecuencia por el número de puntas rotas por cada mil horas de huso. La tasa de rotura final afecta la productividad laboral, la productividad del equipo, la calidad del hilado y el contenido de polvo del taller.
La hilandería es una máquina con la mayor disipación de energía en la hilatura. La disminución de la tasa de rotura final y el ahorro de energía es una marca de nivel técnico de la hilandería.
El inversor de máquina de hilar tiene una rica experiencia en aplicaciones en la industria de la hilatura, especialmente en la industria de las máquinas de hilar. A través de una investigación de varios años, V&T comprende cada flujo de proceso y lanza el inversor dedicado especial para la máquina giratoria.
Sus características técnicas son las siguientes:
a.La etapa de hilo pequeño ocupa el 15% de la longitud total, pero la tasa de rotura final es de aproximadamente el 70%. La velocidad en la etapa de hilo pequeño se puede disminuir apropiadamente según el estado del hilo para disminuir la tasa de rotura final.
b. La etapa de hilo medio ocupa el 80% de la longitud total. El rompimiento final es muy poco, ocupando alrededor del 10%. La velocidad del motor se puede aumentar apropiadamente en esta etapa para mejorar la eficiencia.
C. La etapa de hilo grande ocupa el 5% de la longitud total. La ruptura final es del 20%. La velocidad de rotación del motor se puede reducir adecuadamente en la etapa de hilo grande para disminuir la tasa de rotura final y mejorar la calidad del producto.
El control de la curva técnica a velocidades de varias etapas se puede realizar para el convertidor de frecuencia de acuerdo con las características del marco giratorio. El diagrama esquemático en ejecución se muestra en la Fig. 1.
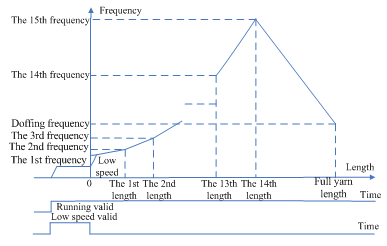
Fig. 1 Diagrama esquemático de funcionamiento de la máquina de hilar
Se puede saber de la Fig. 1 que el funcionamiento a baja velocidad del variador de frecuencia es efectivo en el período inicial y el convertidor de frecuencia emite un comando de funcionamiento a baja velocidad;
Después de cancelar el comando de funcionamiento a baja velocidad, el convertidor de frecuencia funciona de acuerdo con una curva establecida por técnicas de velocidad multietapa. El convertidor de frecuencia acelera a la velocidad multietapa 1 para funcionar.
Junto con el aumento de la longitud de la primera etapa, la frecuencia aumenta gradualmente. Una vez completada la ejecución de la longitud de la primera etapa, el convertidor de frecuencia funciona a la frecuencia 2 de velocidad multietapa. Este proceso cambia a una velocidad uniforme;
Cada ajuste de longitud de hilo de sección aumenta en secuencia. El diseño del parámetro se puede configurar desde el comienzo de la longitud total del hilo, disminuyendo gradualmente la configuración de la longitud de cada sección. La longitud de cada sección está limitada por la longitud de la siguiente sección.
Satisface la siguiente relación: la primera longitud < la segunda longitud < la tercera longitud…….< La 13ª longitud
Supervisión del estado de la máquina de hilar: puede mostrar la posición de la sección en funcionamiento y el número de turno durante el trabajo y realizar un registro en tiempo real de la longitud de hilado actual, el número de pulsos y otros estados de velocidad de varias etapas.
Está provisto de hilo completo, función de advertencia de pérdida de señal de impulso. Después de que el programa complete la ejecución de un ciclo, la terminal de salida Y1 emite 2 ~ 3S impulsos y luego se detiene.
II. Característica funcional
Función de control de cambio de turno, disponible para registrar el rendimiento en cada turno.
Función de advertencia de hilo completo y pérdida de señal de impulso.
Control de curva de técnicas de velocidad multietapa, función de reinicio.
Función de reinicio de cantidad de medidor independiente, disponible para inspección intermedia.
Monitoreo del estado de la máquina de hilar, la unidad de visualización de texto está disponible para monitorear el estado de funcionamiento.
Después de completar un ciclo, el programa regresa automáticamente al punto de partida para estar listo para la próxima ejecución.
Función de conteo de medidores, conteo de pulsos de rodillos de alta velocidad, sin contar durante el descanso y la recuperación del equipo.
Función de almacenamiento de falla de energía, después de que se recupera la alimentación de energía, sigue funcionando desde la posición y frecuencia del segmento antes de la falla de energía.
tercero Modo de conexión
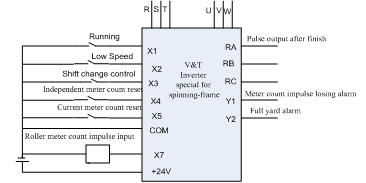
Función de terminal de entrada:
1 X1: Al seleccionar la función de marco giratorio, inicie el inversor.
X2: Jog (prioridad más alta), señal de marcha a baja velocidad. La señal de funcionamiento a baja velocidad es aplicable para el acabado de equipos y se proporciona con mayor prioridad que la velocidad de varias etapas. Configure la frecuencia de funcionamiento a baja velocidad hasta H1.00. La cantidad de metros en esta etapa no se contará en la longitud total de hilatura.
X3: señal de control de cambio (cada vez que lo presione, el número de cambio cambiará de acuerdo con la secuencia de A, B, C y D). Para que sea conveniente para las estadísticas de la cantidad de giros en cada turno, encienda este terminal y luego cambie el número de turno según la secuencia. Está equipado con 4 turnos, a saber, A, B, C y D.
Cada vez que enciende X3, el número de turno actual se convierte en el siguiente número de turno. En este momento, la cantidad de medidores de hilatura aumentará de forma autónoma a un nuevo rendimiento de hilatura. El rendimiento de cada turno se puede ver a través de H1.21 ~ H1.24.
X4: terminal de reinicio independiente (cada vez que lo presione, la cantidad de medidor independiente se reiniciará a 0). La curva técnica no se restablece y se utiliza para la depuración y el juicio en el proceso piloto.
X5: reinicia el terminal para la cantidad actual del medidor giratorio (cada vez que lo presiones, la cantidad actual del medidor giratorio se restablecerá a 0). Para la señal de restablecimiento de la curva técnica, cada vez que la presione, la velocidad de carrera volverá a la velocidad inicial de la configuración de la curva para volver a correr.
X7: Entrada de señal de impulso de rodillos. Entrada de pulso de conteo de medidor de tipo de inducción magnética. Cada vez que el rodillo gira durante una ronda, el número de impulsos aumentará en 1.
Función de terminal de salida:
RA, RB, RC: pulso de salida después de completar la curva, borrar la salida de pulso durante el reinicio o cuando el tiempo de salida alcanza el tiempo de detección de salida de pulso;
Y1: Cuando se pierde la señal de impulso de conteo del medidor, emite una señal de alarma. Esta señal de alarma desaparece durante el reinicio;
Y2:Durante el hilo completo, señal de alarma de salida. Esta señal desaparece durante el reinicio.
Nota:La configuración del código de función para los terminales anteriores es P5.00 = 32, P5.01 = 33, P5.02 = 34, P5.03 = 35, P5.04 = 36. La entrada de impulso se fija como terminal X7. P7.00 = 33, P7.01 = 34, P7.02 = 32.
IV. Configuración de parámetros
|
Código de función No. |
Nombre del código de función |
Papel en el proceso de hilado |
|
P4.22~P4.36 , H1.00 、 H1.32 |
Frecuencia multietapa |
Ajuste de frecuencia de varias etapas en el proceso de hilado |
|
H0.00 |
Selección de modo funcional |
Ya sea para seleccionar el modo de función de giro |
|
H1.01 |
Diámetro del rodillo |
Puede establecer el diámetro del rodillo. |
|
H1.02~H1.16 |
Tamaño de cada segmento |
Configuración de cada tamaño de segmento en el proceso de hilado |
|
H1.17 |
Número de turno actual |
Puede proporcionar la configuración de cuatro turnos, A, B, C y D. |
|
H1.18~H1.29 |
Estado de ejecución |
Estado de funcionamiento actual y longitud de giro de cada turno |
|
H1.30,H1.31 |
Duración de la señal |
Puede establecer la duración de la señal de entrada-salida |
|
H1.33 |
Modo de procesamiento de pérdida de impulso |
Puede seleccionar si procesar cuando se pierde la señal de impulso |
V. Apéndice : mayor descripción del código de función
|
Código de función No. |
Nombre del código de función |
Defecto |
Rango de ajuste |
Unidad |
Atributo |
Opción de código de función |
|
P2.02 |
La ejecución muestra la selección de parámetros |
1CB0 |
0 ~ FFFF |
/ |
○ |
Lugar de la unidad LED : |
|
0 : Frecuencia de referencia ( Hz ); 1 : Tensión de bus (V) ; 2 : Cantidad de medidor de giro actual ; 3 : Velocidad lineal del rodillo delantero ; 4 : Reservado ; 5 : DI (%) ; 6 : Cuenta externa ; 7 : Velocidad del motor (rpm) ; 8 : Referencia de lazo cerrado (%) ; 9 : retroalimentación de bucle cerrado (%) ; A : Torsión de referencia (%) ; B : frecuencia de funcionamiento (Hz) ; C : corriente de salida (A) ; D : par de salida (%) ; E : potencia de salida (kW) ; F : Voltaje de salida (V) ; Lugar de la unidad LED, lugar de los cientos, lugar de los miles |
||||||
|
H0.00 |
Modo de ejecución |
1 |
0~1 |
/ |
○ |
0 : modo de marco no giratorio ; 1 : modo de marco giratorio |
|
H1.00 |
Frecuencia de funcionamiento a baja velocidad |
30.00 |
0.0~P0.13 |
Hz |
○ |
frecuencia superior _ al límite inferior de frecuencia ( P0.13 ~ P0.14) |
|
H1.01 |
Diámetro del rodillo delantero |
25 |
0~100 |
milímetro |
○ |
0~100 mm |
|
H1.02 |
la 1ra longitud |
100 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.03 |
la 2da longitud |
200 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.04 |
la tercera longitud |
300 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.05 |
La cuarta longitud |
400 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.06 |
La quinta longitud |
500 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.07 |
La sexta longitud |
600 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.08 |
La séptima longitud |
700 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.09 |
La octava longitud |
800 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.10 |
La novena longitud |
900 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.11 |
La décima longitud |
1000 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.12 |
La longitud 11 |
1100 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.13 |
La longitud 12 |
1200 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.14 |
La longitud 13 |
1300 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.15 |
La longitud 14 |
1400 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.16 |
Longitud de mudada |
200 |
0~65535 |
metro |
○ |
0~65535m |
|
H1.17 |
Número de turno actual |
A |
A~D |
/ |
﹡ |
Cuatro turnos de A, B, C y D |
|
H1.18 |
Cantidad de medidor de giro actual ; |
0 |
0~65535 |
metro |
﹡ |
0~65535m |
|
H1.19 |
Cantidad de medidor de cambio actual ; |
0 |
0~65535 |
metro |
﹡ |
0~65535m |
|
H1.20 |
Cantidad de metros del turno A |
0 |
0~65535 |
metro |
﹡ |
0~65535m |
|
H1.21 |
Cantidad de metros del turno B |
0 |
0~65535 |
metro |
﹡ |
0~65535m |
|
H1.22 |
Cantidad de metros del turno C |
0 |
0~65535 |
metro |
﹡ |
0~65535m |
|
H1.23 |
Cantidad de metros del turno D |
0 |
0~65535 |
metro |
﹡ |
0~65535m |
|
H1.24 |
Bit bajo de la cantidad total del metro |
0 |
0~65535 |
metro |
﹡ |
0~65535m |
|
H1.25 |
Bit alto de la cantidad total del metro |
0 |
0~65535 |
metro |
﹡ |
0~65535m |
|
H1.26 |
Bit bajo de número de pulso de rodillo |
0 |
0~65535 |
/ |
﹡ |
0~65535m |
|
H1.27 |
Bit alto de número de pulso de rodillo |
0 |
0~65535 |
/ |
﹡ |
0~65535m |
|
H1.28 |
Cantidad de medidores independientes |
0 |
0~65535 |
metro |
﹡ |
0~65535m |
|
H1.29 |
Posición actual del segmento en ejecución |
1 |
0~15 |
/ |
﹡ |
0~15 días Segmento 0 ~ 15 |
|
H1.30 |
Ancho de detección de impulso de salida |
2. 0 |
0.0~3600.0 |
s |
○ |
0.0~3600.0s |
|
H1.31 |
Impulso perdiendo tiempo de retardo de procesamiento |
2. 0 |
0.0~3600.0 |
s |
○ |
0.0~3600.0s |
|
H1.32 |
Frecuencia de mudada |
10. 0 |
0 ~ límite superior de frecuencia |
Hz |
○ |
Frecuencia superior a límite inferior de frecuencia ( P0.13 ~ P0.14) |
|
H1.33 |
Modo de procesamiento de pérdida de impulso |
0 |
0~1 |
/ |
○ |
0 : no procesando ; 1 : procesando |
|
H1.34 |
Velocidad lineal del rodillo |
0.00 |
0~65535 |
milisegundo |
○ |
|
P5.00~P5.06 Aumentar la función del terminal:
32: Arranque del inversor de la curva de técnicas de hilado
33: Arranque de hilatura a baja velocidad
34: entrada de señal de cambio giratorio
35: Entrada de señal de reinicio de cantidad de medidor independiente
36: restablecer la entrada de señal de la cantidad actual del medidor giratorio
P7.00~P7.02 Aumentar la función del terminal:
32: salida de pulso de finalización de curva
33: salida de alarma de pérdida de impulso de conteo de medidor
34: Salida de alarma de hilo completo
35: Apagado de giro del convertidor de frecuencia o salida de funcionamiento de frecuencia cero.
 3-8th Floor, Tower 2, Zhiyan lnnovation Building, Yutang Street, Tianliao Community, Guangming District, Shenzhen, Guangdong Province, China.
3-8th Floor, Tower 2, Zhiyan lnnovation Building, Yutang Street, Tianliao Community, Guangming District, Shenzhen, Guangdong Province, China.
 Ms. Nina
Ms. Nina





Si Usted está interesado en nuestros productos y desea saber más detalles, deje un mensaje aquí, le responderemos tan pronto como nosotros .. puedamos.
Derechos de autor © 2026 Shenzhen V&T Technologies Co.,Ltd.. Reservados todos los derechos. Poder por

Red IPv6 admitida


